
Computer‑Operated Photogrammetric Imaging System
COPIS is a flexible, high‑throughput imaging platform for cultural heritage and natural history collections.
High‑throughput
Batch workflows, automated positioning, and reproducible imaging.
Open & adaptable
Largely 3D printed and off‑the‑shelf parts. Modular software for custom imaging tasks.
Collections-friendly
Built to accomodate a diverse range of museum object types.
Technology overview
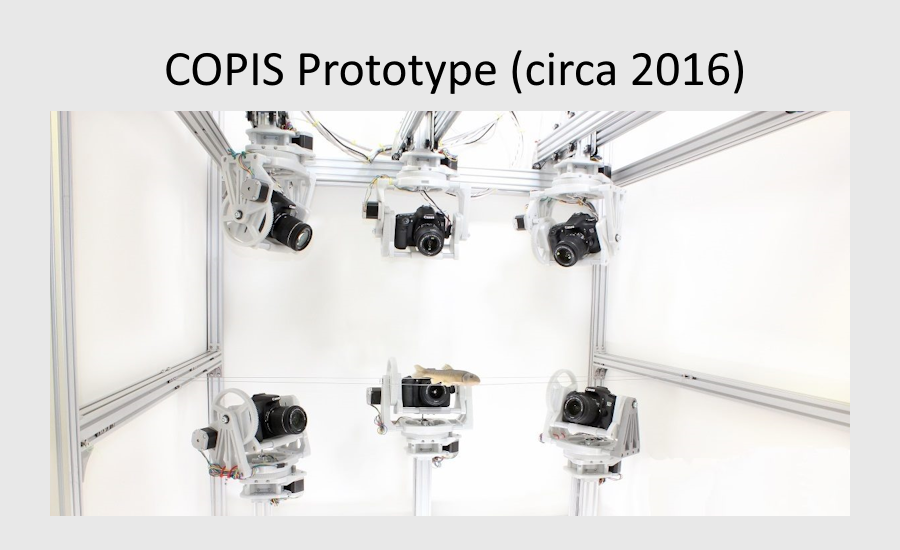
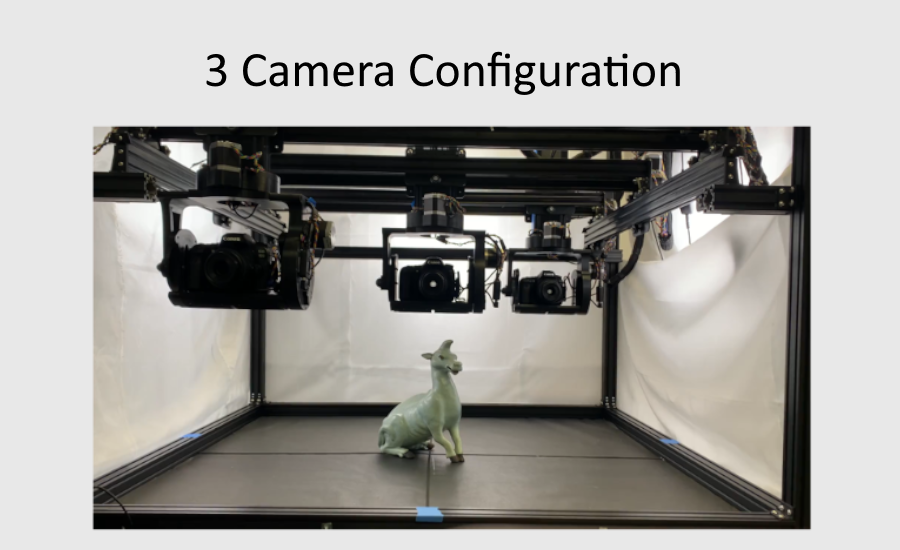
COPIS combines a multi‑axis motion system, controlled lighting, and scripted camera control to enable multi-view imaging of objects.
Typical multi-camera configuration:
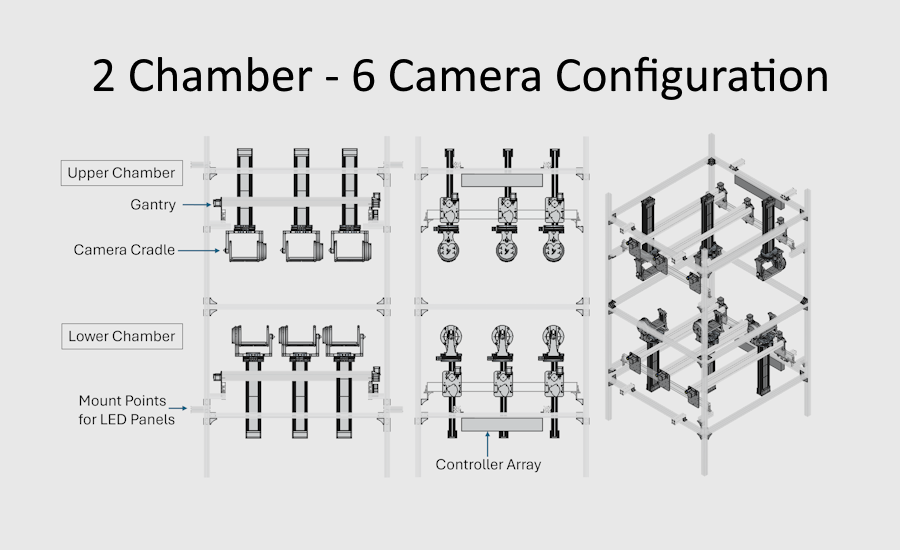
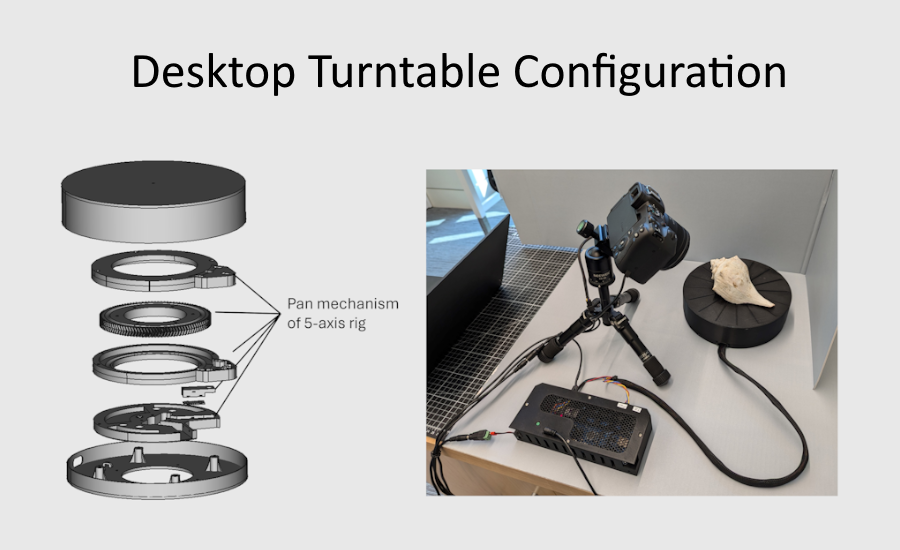
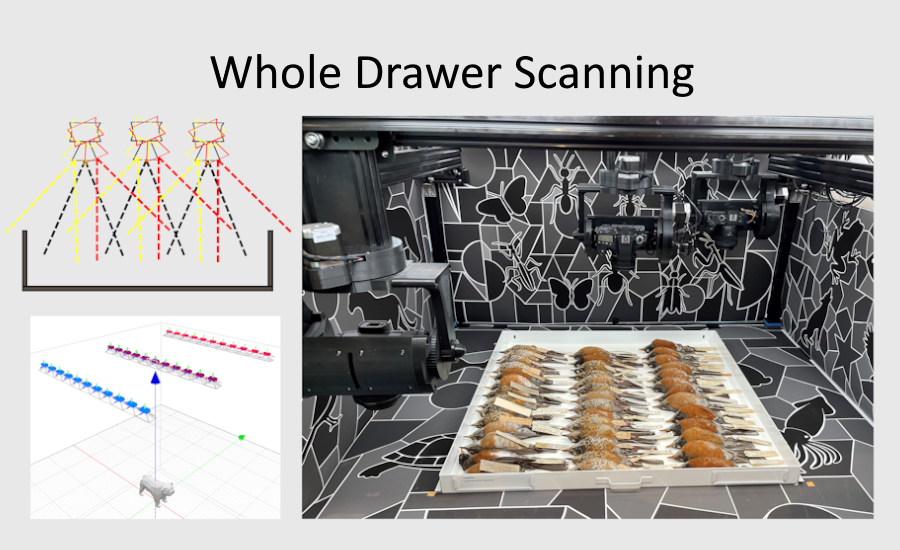
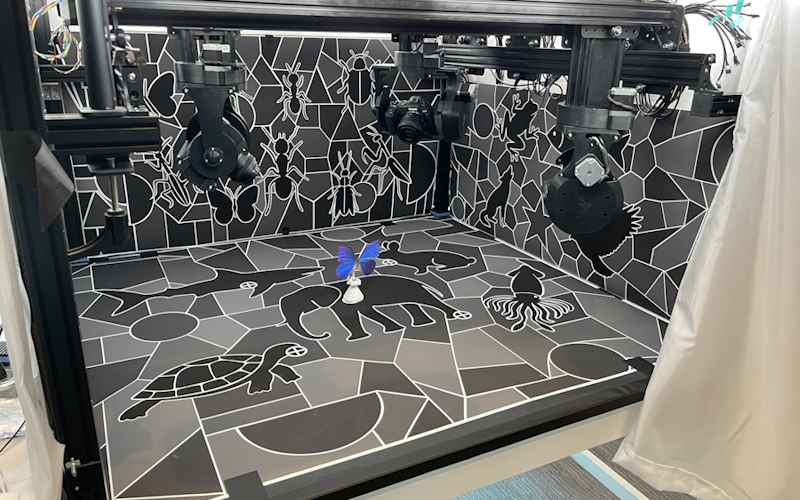
- One or more imaging chambers each with one or more cameras on 5-axis (x,y,z,pan and tilt) gantry
- Custom backdrops can be used to enhance feature detection and image alignment
- Integrated slipring enables infinate multi-turn rotation of the pan-axis
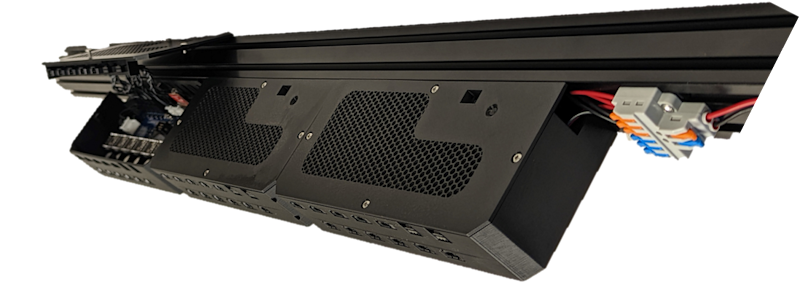
- Positioning and camera actuation driven by custom controller
- Controllers can be daisy-chained to support multiple cameras and positioning systems and communicate with each other via the I2C protocol
- Controllers can recieve text based commands via any serial communications terminal program
- Commands are similar to G-Code with modifications for multiple controller support and camera control
- Custom software also available to generate imaging plans and send orchestrated commands to the controller array
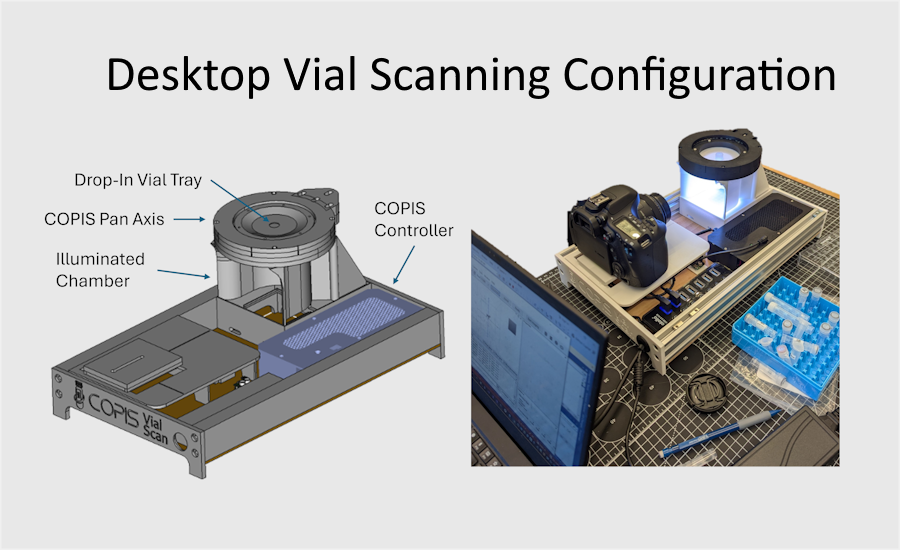
- Controllers can be extended to support control of WS2812 RGB LED arrays (useful for cryo vial scanning configuration where we only want lights on while imaging to minimize heat)
Imaging Chamber
Controller Array
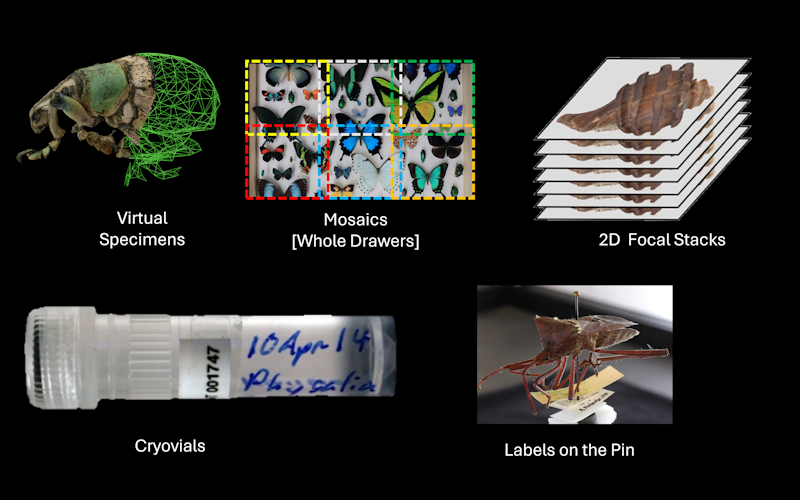
Use cases
COPIS multi-view imaging can support a diverse range of imaging use cases
- 3D Reconstruction
- Photogrammetry
- Gaussian Splatting
- Depth stacking along any linear direction
- Image stitching
- Label composition from fragmentary views
- Pinned insect labels
- Jar and vial labels
Example 3D Reconstructions
YPM MAM.003245 Red fox (skull)
YPM ANT.248961
YPM ENT.608775 Papilio polyxenes
YPM BC.036944 Cylinder Seal
YPM BC.036944 Virtual Impression
Resources
Contributors & support
- Yale Peabody Museum (YPM): Genevieve Rios, Djihbrihou Abibou, Kevin Chen, Roger Colton, Casey Dunn, Lawrence Gall, Agnete Wisti Lassen, Jeremy Pustilnik, Ngoc-Nhu Tran, Maureen DaRos White, Klaus Wagensonner, Greg Watkins-Colwell, Kristof Zyskowski
- Tulane University (TU): Henry L. Bart Jr.
- Biodiversity Outreach Network (BON): Neil Cobb
- Museum of Comparative Zoology (MCZ): Crystal Maier, Naomi Pierce
- Duke University (DU): Doug Boyer
- University of Florida (UF): Michael Denslow, Robert Guralnick
- Argonne National Laboratory (ANL): Nicola Ferrier, Mark Hereld
- Commonwealth Scientific and Industrial Research Organisation (CSIRO): Nicole Fisher, Wei Ran
The COPIS Project has been made possible in part by support from Yale University, the National Endowment for the Humanities: Exploring the Human Endeavor (award no. HAA-266508-19 ), the Institute of Museum and Library Services (award no. MG-45-15-0003-15) and the National Science Foundation (award nos. MCB 1027830, DBI 2104149, DBI 2104150, DBI 2104151, DBI 2104152)). Any views, findings, conclusions, or recommendations expressed in this website do not necessarily represent those of the National Endowment for the Humanities, the Institute of Museum and Library Services or the National Science Foundation.
Contact
For more information, contact Genevieve Rios genevieve.rios@yale.edu